Центр НТИ "Технологии компонентов робототехники и мехатроники" Иннополис
Центр был создан в 2018 году на базе Центра развития робототехники Университета Иннополис.
Центр НТИ – один из крупнейших центров в стране, разработки которого охватывают широкий спектр научных и научно-технических задач робототехники и мехатроники. Направления работы центра включают исследования в области промышленной и коллаборативной робототехники, создание новых робототехнических решений для медицины и реабилитации, дома, сельского хозяйства, разработка человекоподобных и многоногих шагающих роботов, беспилотного летательного и наземного транспорта. Деятельность Центра направлена на внедрение робототехнических систем в нефтегазовой отрасли, машиностроении металлообработке, авиационной промышленности, автомобильной промышленности, судостроении, сервисном обслуживании и т.д. Центр НТИ представляет собой консорциум, в который входят 15 ведущих университетов и 6 прикладных академических институтов, 17 индустриальных партнеров, а также 7 иностранных партнеров.


Проведение НИР и ОКР в области промышленной робототехники по следующим направлениям: метрология и калибровка, манипуляция и планирование движений, коллаборативная робототехника, разработка роботизированных ячеек и их компонентов.
Проведение НИР и ОКР в области управления, мехатроники и прототипирования по следующим направлениям человекоподобные роботы и промоутеры; динамика и системы управления; исполнительные механизмы и системы; моделирование и проектирование сложных робототехнических систем; восприятие, манипуляция и телеуправление; мехатроника, сенсорика и очувствление; аддитивные технологии и прототипирование робототехнических систем.
Проведение НИР и ОКР в области специальной робототехнки по следующим направлениям: мобильная робототехника, сервисная робототехника, сельскохозяйственная робототехника, когнитивная и социальная робототехника.
Проведение НИР и ОКР в области автономных транспортных средств по следующим направлениям автономные наземные транспортные средства; беспилотные летательные аппараты; подводные и надводные роботы; гомогенное и гетерогенное групповое взаимодействие беспилотных аппаратов.
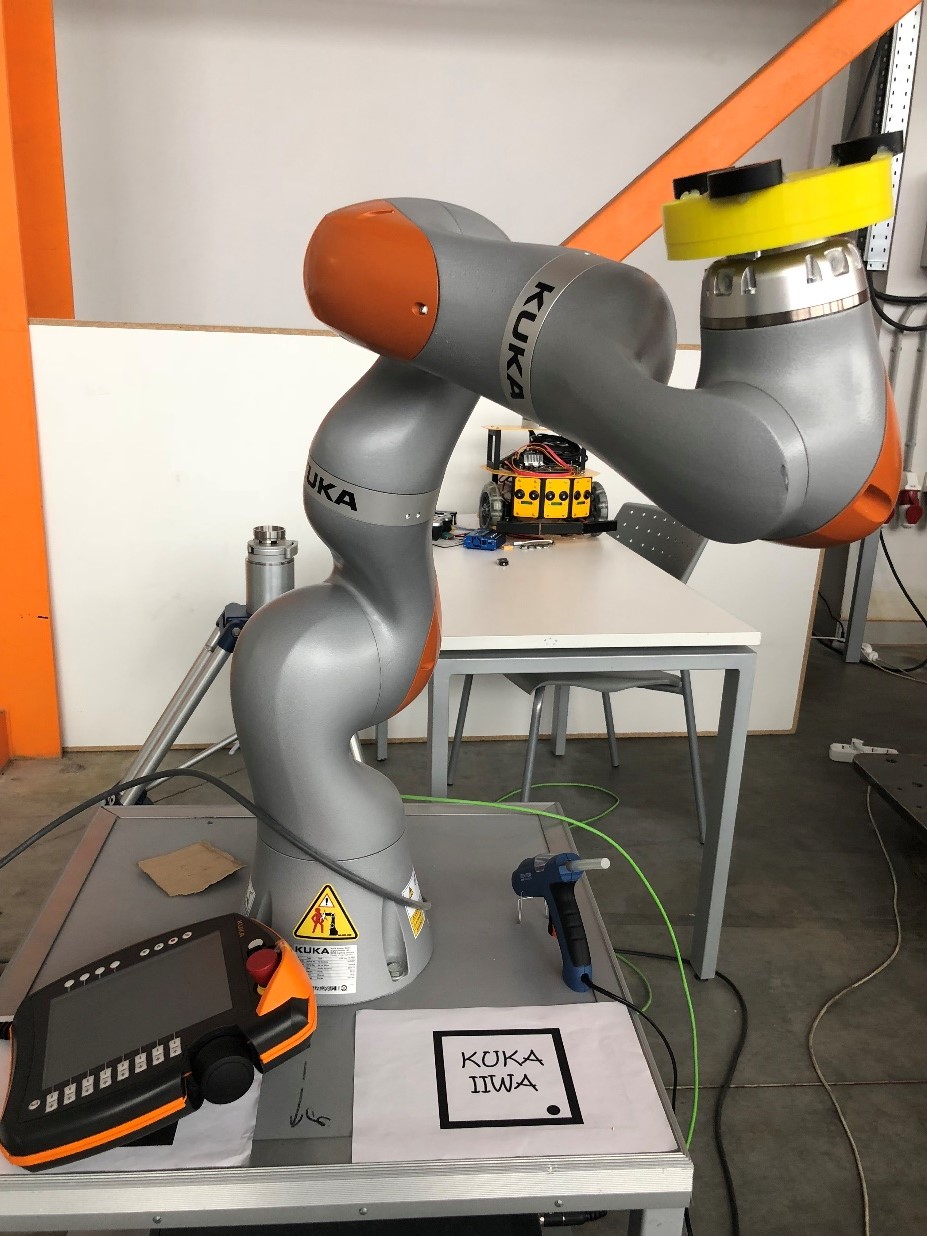
Робот-манипулятор KUKA IIWA
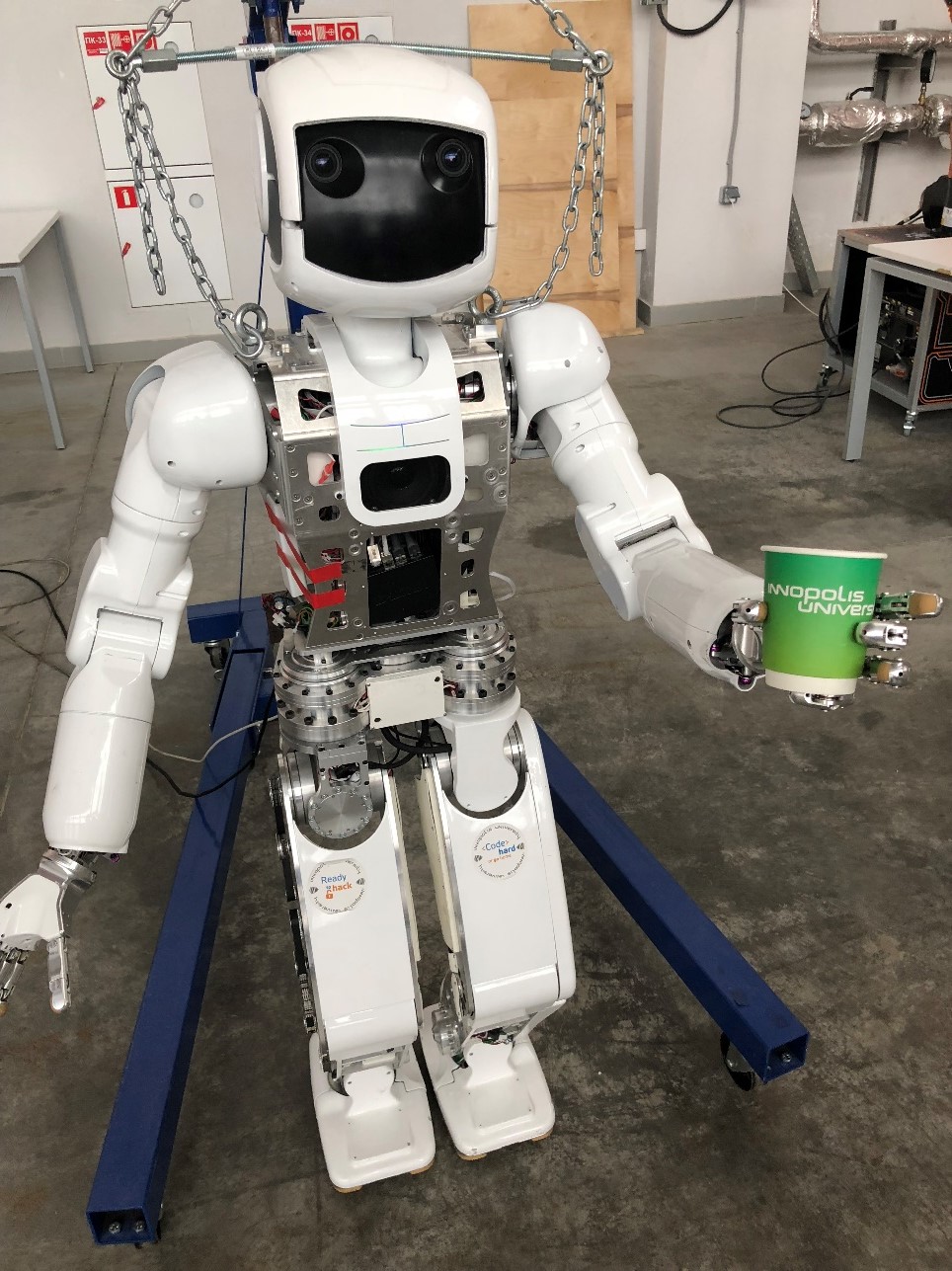
Шагающий робот AR-601M
Очки смешанной реальности Microsoft HoloLens
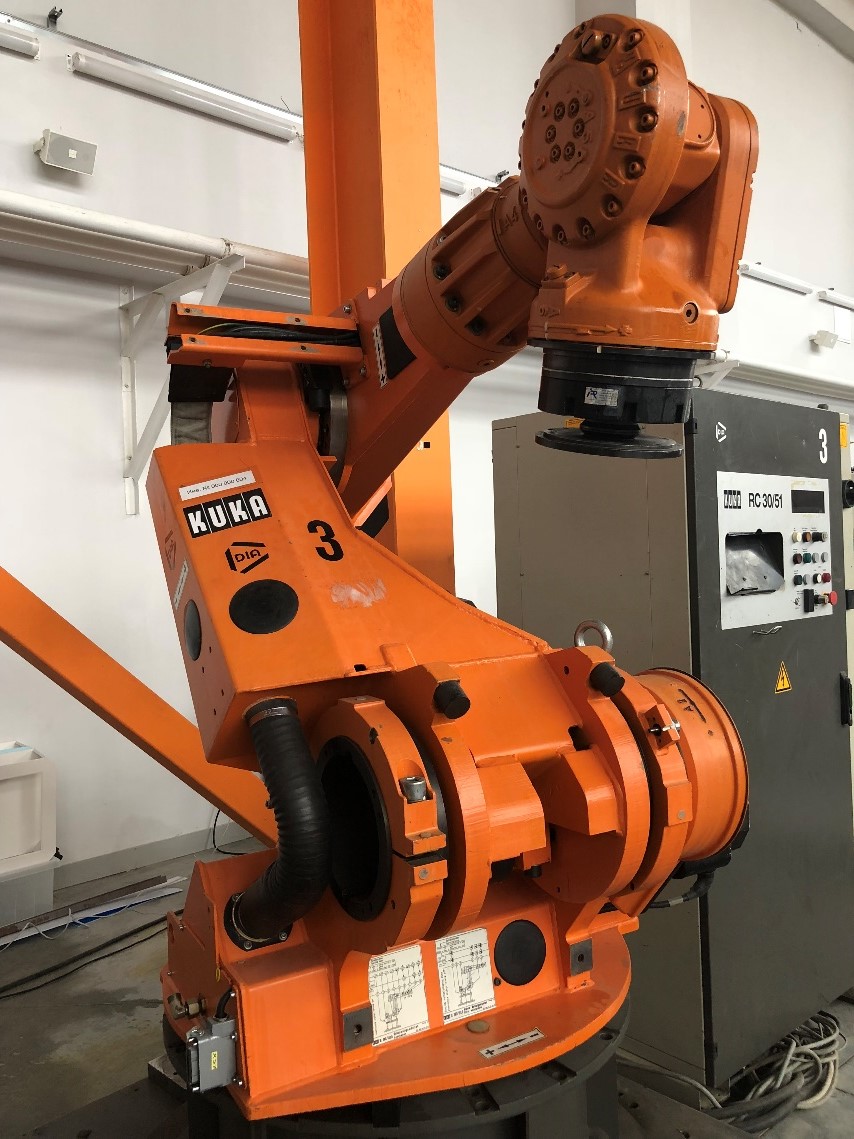
Робот-манипулятор FANUC R-2000iC/165F
Легковой автомобиль Kia Soul EV
Суперкомпьютер Nvidia DGX-1
Лазерный трекер FARO VantageE
Робот-манипулятор Kuka Agilus
KUKA IIWA – первый серийно выпущенный робот, предназначенный для кооперации с человеком. Наличие датчиков усилия в суставах позволяет увеличить безопасность робота и делает возможным решение деликатных задач.
Полномасштабный антропоморфный двуногий шагающий робот AR-601M, который производится компанией ПАО «Андроидная техника». Робот АR-601M построен на базе силового каркаса из легких сплавов с элементами силового электропривода. При росте 145 см AR-601M весит 65 кг, имеет 41 степень свободы, из которых по 6 приходятся на каждую ногу. Манипуляторы робота позволяют оперировать с предметами бытового обихода, основываясь на внутренних системах – навигации и технического зрения. Встроенная сенсорная система помогает АR-601M ориентироваться в пространстве и удерживать равновесие. Программы синтеза и распознавания речи позволяют человеку общаться с АR-601M, отдавать ему команды. Непрерывная работа АR-601M без подзарядки составляет до 2-х часов и напрямую коррелирует с интенсивностью выполняемых задач и их сложностью.
Очки смешанной реальности Microsoft HoloLens используют 64-разрядный 4-ядерный процессор Intel Atom x5-Z8100 с частотой 1,04 ГГц. В дополнение к центральному и графическому процессорам HoloLens имеет голографический процессор, разработанный Microsoft специально для HoloLens. Голографический процессор, размещённый в корпусе 12 × 12 мм, использует 28 цифровых сигнальных процессоров производства Tensilica для обработки и интеграции данных, поступающих со всех сенсоров, а также пространственного сканирования помещения, распознавания жестов, голоса и речи. По утверждению разработчиков, голографический процессор обрабатывает «терабайты информации». SoC и голографический процессор имеют 8 Мб встраиваемой памяти SRAM и по 1 Гб LPDDR3.

Робот FANUC R-2000iC/165F - 6-осевой многопроходный промышленный робот, предназначенный для максимального использования рабочего пространства и быть ближе к другим роботам. Он может обрабатывать полезную нагрузку 165 кг, является гибким роботом с невероятно способным тонким запястьем, который предлагает отличное время цикла, подходящее для задач точечной сварки, обработки материалов среди других областей применения.

Легковой автомобиль Kia Soul EV, на базе которой Университет Иннополис разрабатывает беспилотную платформу для проведения исследований в области автономного транспорта. Проведена доработка автомобиля, чтобы обеспечить управление с помощью внешнего компьютера. На платформе размещены сенсоры, которые обеспечивают построение адекватной модели окружающей среды.

Суперкомпьютер Nvidia DGX-1 — первый в мире компьютер, специально разработанный для задач глубокого обучения и нейронных сетей. Суперкомпьютер будет использован нашими сотрудниками при разработке алгоритмов движения беспилотного Камаза, научат антропоморфного робота ходить по пересечённой местности.

Лазерный трекер FARO VantageE представляет собой трекер нового поколения. Инновационная технология дистанционного управления RemoteControls™, высокая точность, компактность и защищенное исполнение новых трекеров FARO обеспечивает простоту и удобство трехмерных измерений крупногабаритных объектов.

проект – НТИ, партнер – Аркодим, срок реализации – с 2017-2018 г.
проект ФЦП, партнер – КАМАЗ, сроки реализации – 2017-2019
проект ФЦП, партнер – Андроидная техника, сроки реализации – 2017-2019




